May,07 2026 楽にテイクオフすることの物理的考察と波からみた力の応用やボードの長さ・浮力
パドル・テイクオフの速さ、楽なテイクオフや、波からみたボードの浮力などを考えてみた。
波の波形運動の本質は上下運動とその伝播
波組成の根本は風浪などを除けば気圧変動等による海面の上下動であり、それが隣接する水へ順次伝播することで「波形」が前進する。
水粒子が円軌道を描くのはこの伝播の結果であって原因ではない。 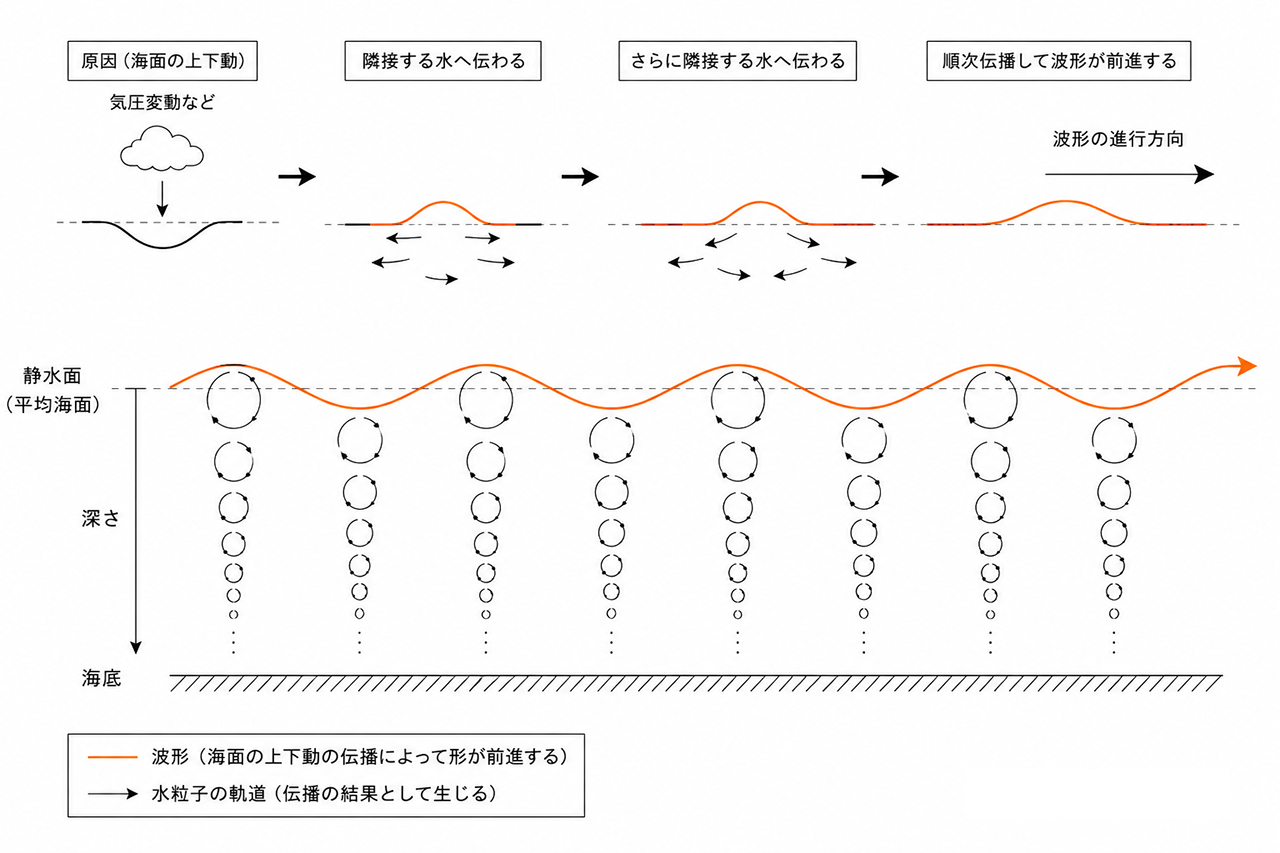
海面が上下動する
- → その上下動が隣の水へ伝わる(伝播)
- → 位相のずれにより、見かけ上「波形が前進」する
- → 各水粒子の上下動の軌跡が円・楕円状に見える
円軌道は結果であり、波の本質は上下動の伝播である。
サーファー視点
沖合のうねりを見るとき感じる「盛り上がりが動いてくる」感覚は正しい。
水が来るのではなくエネルギーが来る。だからこそボード側から能動的に「受け取りに行く」必要がある。
推進力の源:波の上昇力に対するボードの下方圧力物理
これがサーフィンの推進力の核心である。
波形の上昇運動がボード下面を押し上げようとする。それに対しボードとライダーの重力が下方向に働き、下面に動的圧力(hydrodynamic pressure)が生まれる。
波形の上昇運動 → ボード下面への上向き力
ボード+ライダーの重力(mg)→ 下向きに押し返す
↓
ボード下面に動的圧力(hydrodynamic pressure)が発生
↓
水が後方・下方へ偏向される
↓
反作用として前方推力(thrust)が生まれる
初速・パドリング時にボードを水平に保つことが最大効率である理由はここにある
水平ボード(最適)
下面全面積が波の上昇力を受ける。圧力分布が均等になり、planing状態への移行が最もスムーズ。波の上昇エネルギーを最大面積で捉える。
ノーズ下げ(斜面形成前では不利)
有効受圧面積が減り、圧力変換効率が落ちる。pearling(ノーズ刺さり)リスクが増す。斜面が明確になった後ならば話は別。
サーファー視点
「水平テイクオフ」という指導の根拠がここにある。
斜面を滑る意識は正しいが、それはこの段階の後。まず波の上昇力をフラットなボードで受けることが先決であり、これを飛ばして斜面を意識すると全体の流れが崩れる。
「水平テイクオフ」の物理的実態
「水平テイクオフ」は視覚的目安としては機能するが、流体力学的な実態を捉え切るには少々不足かもしれない。
海外の技術論・CFD研究ではより正確な概念が使われているが、「水平」という指導が何を意味するかを正確に理解するには、まずボードが受ける力の方向----すなわち浅海変形によって変化する波のベクトルから出発しなければならない。
【波形運動の変化】浅海変形による軌道運動ベクトルの変化
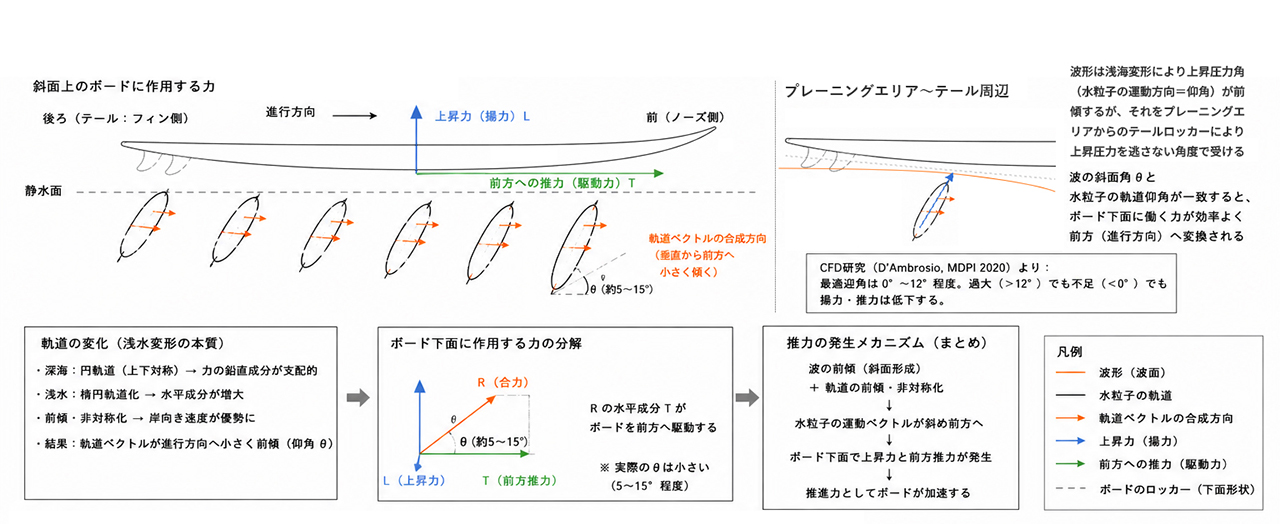 深海:水粒子は円軌道を描く。上下動が支配的で前方成分は微小。
深海:水粒子は円軌道を描く。上下動が支配的で前方成分は微小。
↓ 浅瀬に近づくにつれ海底の影響で軌道が変形 浅水域:円軌道が楕円に扁平化する(Airy波理論・観測で確認)
↓ さらに非線形効果により非対称性が発達 岸向き(前方)の軌道速度が沖向きより卓越するvelocity skewnessが生まれる
↓ 波形の前傾とあいまって、水粒子の運動ベクトルは 「ほぼ上下」→「進行方向への仰角を伴う斜め前方」へ変化する
これがボード下面に作用する力の方向を決定する根本であり、「ボードが受け止めるべき力のベクトル」の出発点となる
【受け面の特定】有効プレーニング面(Effective Planing Surface)
- ノーズロッカー:プレーニング後は水上に出る。揚力に不参加。抵抗回避の余白
- フラットエリア:動的圧力の主発生源。よどみ線(Stagnation Line)は速度上昇とともに後方へ移動し、重心(CoG)からテール寄りにかけてが有効受圧面となる
- テールロッカー:ここが肝だ。
ボードを水平に保つからこそ、テールロッカーによるテール付近のボトムの上向き傾斜が、浅海変形で生まれた波の仰角(5〜15°程度)と向き合う角度になる。
水平に保つことが前提であり、その状態でテールロッカーの傾斜と波の仰角が整合する----完全な直角ではないが圧力として「逃げにくい角度」に入る。
逆にノーズを下げる(前傾する)または上げる(後傾する)と、この整合が崩れる。
テールロッカーと波の仰角の関係が悪化し、ボトム面が水流=揚力を受け取らず受け流すようになる----力が逃げる状態だ。
つまりテールロッカーは「ボードを水平に保ち、かつ波が前傾したとき初めて力を効率的に受ける設計にもなっている」。
深海のフラットなうねりではその恩恵が薄く、波が立ち始めた瞬間からテールロッカーが機能し始める----これがテイクオフのタイミングの物理的根拠の一つでもある。
- → ボード全体ではなく重心(CoG)からテール寄りのフラットエリア〜テールロッカーが力を受ける面
- → スタンドアップ時のスタンスは前足・後足で重心ラインを跨ぎ、このエリアへ荷重を分散させる
【トリム状態の定義】「水平」の物理的実態
波の斜め前方ベクトル(浅海変形で生まれた仰角を持つ合成力)
↕
フラットエリア〜テールロッカーの迎角(Angle of Attack)
この両者が最適な角度で調和した状態=トリム状態(Trim)
Savitsky理論(1964)のプレーニング船体への応用:
揚力はプレーニング面の迎角・速度・濡れ面積の関数であり「海面に対して水平」という概念はこの枠組みに存在しない。
CFD研究(D'Ambrosio, MDPI 2020):
迎角0°〜12°の範囲に最適値が存在し、過傾・不足傾の双方で揚力・推力が低下することが確認されている。
Greenlight設計論:揚力は運動方向に対して常に垂直に発生する----鉛直上方ではなく、波の進行方向に依存する。
| 概念 | 日本(一般的指導) | 海外(物理的アプローチ) |
|---|---|---|
| 「水平」の定義 | ノーズを下げてボードを海面に対して水平に見せる。視覚的・姿勢的アプローチ。 | Trim(トリム)。ボードのフラットエリアを水流に対して最適な迎角(Angle of Attack)に維持すること。海面に対する平行ではない。 |
| 力の受け面 | ボード全体を水平にすること自体が目的化されやすい。 | 重心(CoG)と圧力中心(CoP)の配置、および有効プレーニング面(Effective Planing Surface)の角度が重視される。 |
| ロッカーの扱い | パドル中にノーズロッカーを目視し、傾きと誤認しやすい。 | ロッカー形状に体を合わせることで、フラットエリアが水流を最適角度で受ける状態(trim state)を作る。 |
斜面を滑る意識のマイナス影響
特にテイクオフ時に斜面を降りる意識が強く、前傾しすぎると圧力中心(CoP)が前方へ移動し過ぎ、重心付近の最適受圧点での受圧制御を減らすことになる。
波の斜め前方ベクトルに対してボードが前傾しすぎると、水流はボード下面を「押す」のではなく「通り過ぎる」だけになり揚力と動的圧力の双方を逃がす状態だ。
前述CFD研究にあるように、過傾・不足傾の双方で揚力・推力が低下することが確認されている。
※レイトテイクオフなどではなくあくまでも一般論的なもの
物理的実態としての「トリム状態」:
- → フラットエリアを波の斜め前方ベクトルに対して最適な迎角に保つこと(Savitsky理論の応用)
- → 有効プレーニング面は重心(CoG)からテール寄りに集中する
- → テールロッカーの傾斜がこのベクトルと調和したとき最大推進力が得られる
- → 「水平」とは結果として得られる安定状態の近似表現であり、プロセスはフラットエリアへの荷重制御だ
サーファー視点
うねりを過ごしながら最も持ち上げられる角度を体感で探す--その姿勢がそのボードのトリム状態だ。「ノーズを下げる」意識は斜面滑空への偏重であり、波の上昇エネルギーを速度に転換するという本質から外れる。
パドルは速いのに乗れない・加速しないという現象はここに原因がある。
初速(パドリング)の役割物理
浮いているだけ(初速ゼロ)の状態では、波の上昇力を受けても有効な前方推力はほとんど生まれない。初速には二つの機能がある。
機能①:波速への同期
ボードの速度が波の位相速度(C ≈ √gd)に近づくほど、相対速度が適切になりplaning liftが発生しやすくなる。速度が不足すると波に置いていかれる。
機能②:それ自体が推力
パドリングで得た運動量は波の前方成分と合わさり、ボード下面への有効な動的圧力を引き出す。初速は波のエネルギーを引き出すための「鍵」でもある。
初速が波速に近いほど → 波の上昇力を推力に変換する効率が上がる
初速がゼロに近いほど → 上昇力は単なる上下動に終わり前方推力にならない
サーファー視点
「もう少し早くパドルしていれば乗れた」という感覚は正確な物理認識だ。初速が波速に届いた瞬間、急に「波が押してくれる」感覚を得る----それがplaning移行の瞬間である。
斜面形成後:重力水平成分の参入物理
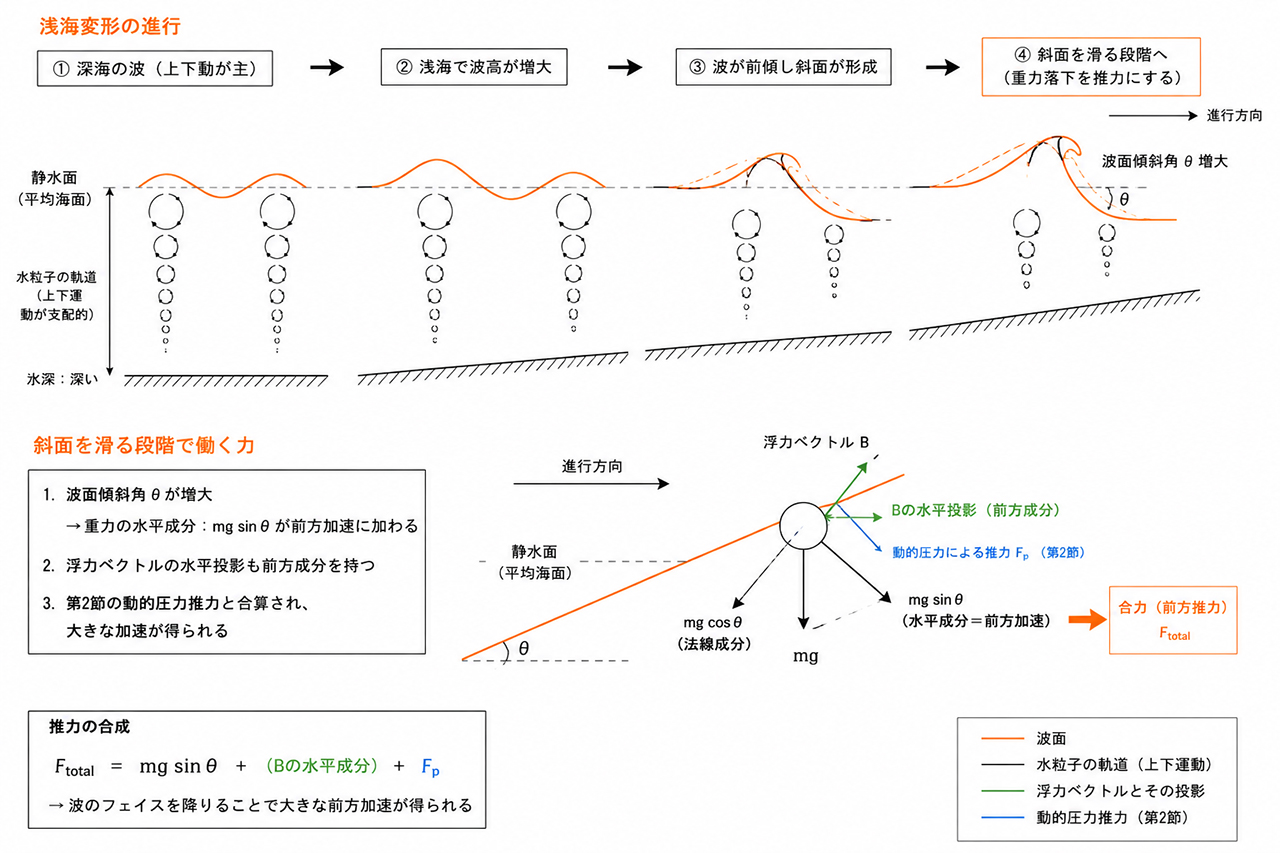 浅海変形で波が前傾し、明確な斜面が生まれると推進力の構成が変わる。ここから「斜面を滑る」段階が始まる、波のフェイスを降りることで推力を得るようになる。
浅海変形で波が前傾し、明確な斜面が生まれると推進力の構成が変わる。ここから「斜面を滑る」段階が始まる、波のフェイスを降りることで推力を得るようになる。
波面傾斜角 θ が増大
- → 重力の水平成分:mg sinθ が前方加速に加わる
- → 浮力ベクトルの水平投影も前方成分を持つ
- → 第2節の動的圧力推力と合算され、大きな加速が得られる
日本サーフィン文化の盲点
「サーフィン=斜面を滑ること」ではあるが、ことテイクオフに関しては斜面滑空は第2節・第3節の段階であり、波の上昇力をボードの重さで受けて推力に変換するという意識が薄い。
結果としてテイクオフの核心が「タイミング」や「斜面への合わせ方」に矮小化され、波のエネルギーを速度に転換するという本質が語られない。
ライディング中の加速:踏み込みと動的圧力物理
planing状態に入ったライディング中、加速の主役は「ライダーがボードを通じて波に与える下方圧力」だ。
波の上昇力に対して能動的に押し返すことで推力を引き出す----テイクオフと同じ原理の積極的な応用である。
- ライダーの踏み込み → ボード下面圧力↑
- → 水が強く後方偏向される
- → 反作用として前方推力↑
破綻=沈みすぎ(stall)にならない限り、沈み量・踏み込みに比例して加速する
サーファー視点
リエントリーからの動作、ボトムターンでの深い踏み込みは、この動的圧力を意図的に最大化する操作だ。「波に乗る」ではなく「波を踏んで加速させる」という感覚が、ライディング中の物理的実態に近い。
浮力の二面性
テイクオフでは高浮力=有利(初速を得やすく波の上昇力も拾いやすい)。しかしライディング中は逆効果になる。浮力が高すぎるとライダーの踏み込みが下面に伝わらず、動的圧力が弱まり加速しにくくなる。
ボード選択の物理的根拠
高浮力・長いボード
- ✓ パドル初速を得やすい
- ✓ 弱い上昇力も広い面積で拾う
- ✓ 波速同期が容易
- ✗ 踏み込みの下面伝達が弱い
- ✗ 急変形で斜面推力が早期に介入
- ✗ 旋回慣性が大きい
低浮力・短いボード
- ✓ 踏み込みを直接下面に伝える
- ✓ 動的圧力・推力の生成が鋭い
- ✓ 加速レスポンスが良い
- ✗ パドリングでの初速確保が難しくなる
- ✗ 弱い波では上昇力を拾いにくい
- ✗ テイクオフのタイミングがシビア
サーファー視点
基本的な「波が小さいときは長いボード」は経験則ではなく、「波の上昇力が弱いとき、接触面積と浮力で補う」という物理的選択だ。
状況を読んでボードを選ぶことは、物理的条件を読むことと同義である。
どのようなサーフィンを、どんな波でするかという前提条件で最適解は全く変わる。
浮力と長さはそれぞれ異なる物理的機能を持ち、トレードオフの関係にある。
テイクオフ初速の難度を容認できる場合
→ 低浮力(沈みやすい)ボードの方が加速しやすい
踏み込みが直接下面に伝わり、動的圧力・推力が強く生まれるため
高浮力ボードで反発を活かす場合
→ 体重・脚力・スタンスの三つが揃って初めて成立する(後述)
代替策:長くして浮力を抑える
→ 長さで波の上昇力を広く拾い、低浮力でライダー入力を下面に伝える
捕捉しやすさと加速・マニューバ性能を同時に得るバランス手法
高浮力ボードで反発を活かすための三条件
条件①
体重
自重でボードが自然に適切な深さまで沈む。体重が重いほど意図的な踏み込みなしに動的圧力が生まれやすい。
軽いライダーが高浮力ボードを使うと沈めたくても沈まず、浮きすぎの主因になる。
条件②
脚力
体重だけでは不足する場合に、意図的な踏み込みで追加の下方圧力を加える。沈め込みの量と速度をコントロールし、反発のタイミングを引き出す。
脚力不足では沈め込みが浅くなり反発が小さい。
条件③
スタンス
planing発生点(動的圧力が最大化されるスイートスポット)に正確に荷重できるかどうか。前後位置のずれは推力変換効率を大きく落とし、左右バランスのずれはレールの水流偏向に直接影響する。
※体重・脚力が揃っていても、スタンスがずれると圧力が分散して反発が得られない。
プロサーファーの設計意図
プロがやや高浮力(narrow + thick)を選ぶのは、この三条件を高いレベルで満たしているからだ。
沈めた瞬間に強い反発(hydrodynamic lift)が返ってくることで、急加速・pop・レールエンゲージメントが可能になる。浮力を「ただの浮き」ではなく「コントロールされた反発のバネ」として設計している。
一般サーファーが同じボードで加速しにくいのは体重・脚力・スタンスのいずれか、あるいは全てが不足しているからであり、ボード自体の問題ではない。
CTレベルの運動設計
CTレベルのサーファーはアクション後に「ただ降りる」のではなく、降りる動作を余すことなく推力発生の機会として設計している。
アクション終了時にレールを波面に入れ、その沈め込みによる浮力の反発推力(hydrodynamic lift)を引き出しながら、波の斜面による重力の水平成分(mg sinθ)による落下加速を合算する。
結果として、アクション後の「降り」の瞬間が次のセクションへの最大加速フェーズとなる。
一般サーファーの「アクション後に失速する」という現象は、アクションするポジションの悪さを除けば、この二つの推力を取り逃がしていることが主因だ。
波・スタイル別の物理的指針サーファー
条件 | 推奨方向 | 物理的理由
小波・弱波 | 長め+やや高浮力 | 波の上昇力を広く拾い、初速を確保しやすくする
良質中〜大波 | 低浮力+短め | 圧力伝達が良く、動的推力・ターン性能が高い
捕捉と加速を両立 | 長め+低〜中浮力 | 面積で上昇力を拾い、低浮力で踏み込み伝達を確保
パドリングが弱い | 高浮力優先 | 初速難度を下げ、波速同期を容易にする
体重・脚力・スタンスが揃っている やや高浮力(反発活用)
推進力の変遷:テイクオフから加速まで
- 浮遊状態(うねり通過) -- 波の上昇力を受けるが、初速ゼロでは有効な前方推力にならない。上下動に終わる。
- パドリング開始 -- 初速が波速に近づく。ボード下面に動的圧力が生まれ始め、前方推力の変換効率が上がる。
- 波の上昇力を水平ボードで受ける -- 推進力発生の核心段階。ボードの重さが押し返すことで動的圧力が最大化、planing liftへ遷移する。
- 斜面形成・立ち上がり -- 重力水平成分(mg sinθ)が参入。前段階の動的圧力推力と合算され大きな加速が得られる。
- ライディング・マニューバ -- ライダーの踏み込みによる動的圧力の能動的制御が主役。波のエネルギーを積極的に引き出す段階。
上昇波形と上からの押圧で生じた力をその進行に合わせる
ボードにはロッカーがありプレーニングエリアもそれぞれなので、水平といってもボードによって若干異なり、パドル姿勢でノーズを見てると解りづらく勘違いしかねない。
パドルの状態でうねりを過ごし、より持ち上げられる角度を試してみるとかすると解りやすいかもしれない。
動的圧力(hydrodynamic pressure)という概念
「タイミング」「斜面への合わせ方」「体の使い方」―これらは全て正しいが、なぜそれで推力が生まれるかという力学的根拠が抜けている。根拠がなければ、改善の変数は「経験」と「センス」にしか帰着しない。
「水平テイクオフ」一つをとっても同じことが言える。
ロッカーによる揚力はエントリーロッカー部分で主に生まれ、エントリーロッカーが大きいほど揚力ポテンシャルは上がるがドラッグも増大する。
特にパフォーマンスボードのボトムに平らな面=水平的な面はほぼ無いが、「水平」とはボード底面の物理的な水平ではなく、そのボードのプレーニングエリアが水流に対して最適角を取る姿勢のことであり、ロッカー形状によってボードごとに異なる。
パドル中にノーズロッカーを目視して「水平からのずれ」と誤認する問題も、この理解があれば起きない。
また、波待ち中にうねりを過ごしながら最も持ち上げられる角度を体感で探すことで、そのボードの最適プレーニングポジションを物理的に見つけられる可能性もある。
何より、波形の上昇運動と、それに対するボード上からの押圧によって生じた動的圧力を、波の進行方向に合わせて前方推力として回収する----これがサーフィンの推進力の本質。
テイクオフの「水平ボード」も、ライディング中の「踏み込み」も、CTレベルの「アクション後のレール入れ」も、全てこの一点の異なる局面における表現に過ぎない。
ロッカー・浮力・長さ・体重・脚力・スタン―ーこれらは全て、この動的圧力をどれだけ効率的に生み出し、波の進行方向へ変換できるかという一つの問いに対する変数であり、条件によって最適解は変わるものの、問い自体は変わらないだろう。
keep surfing.